Hall effect sensors are used to sense magnetic field. In my previous job experience, I had the opportunity to use many of these sensors with brushless motor, in order to know the rotor position and to be able to switch windings correctly.
This article will introduce the hall effect, common type of sensors and brushless motor appliance.
Hall Effect Principles
The Hall effect is named after Edwin Hall, who in 1879 discovered that a voltage potential develops across a current-carrying conductive plate when a magnetic field passes through the plate in a direction perpendicular to the plane of the plate, as illustrated in the lower panel of figure.
The fundamental physical principle behind the Hall effect is the Lorentz force, which is illustrated in the upper panel of figure. When an electron moves along a direction, v, perpendicular to the applied magnetic field, B, it experiences a force, F, the Lorentz force, that is normal to both the applied field and the current flow.
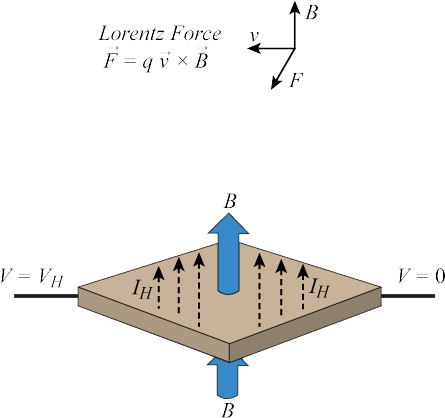
Figure 1. The Hall effect and the Lorentz force.
The blue arrows, B, represent a magnetic field passing perpendicularly through the conductive plate.
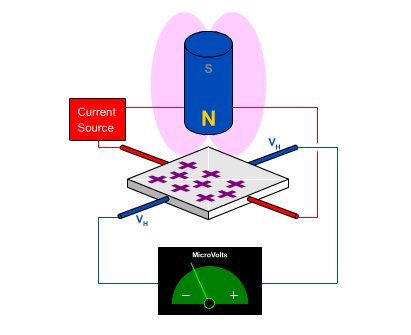
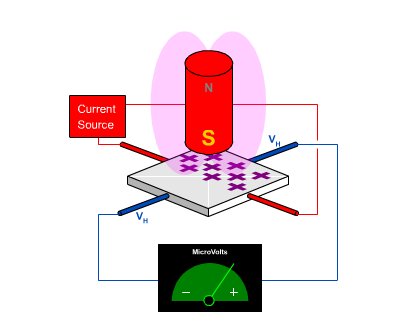
Figure 2. North and South fields generate voltage, perpendicular to current source.
Hall Sensors, but for what
Hall sensors are used in many application, below few examples :
- Pneumatic piston, to detect when it’s fully retracted or extended
- Clamshell phone, for a contact less sensor when you close it
- Automotive, to know the motor or wheel speed rotation
- Motor, for speed sensor or rotor position
- Current sense, hall effect is linear, and it’s used for high current sensors
The mains advantages of this electronic contactless sensors (vs mechanical one) are :
- No mechanical fatigue or faillure
- Can quickly change is state, good sensitivity
- Can be used within explosive environments (eg : ATEX)
- Provide isolation measure for current sensing
Type of sensors output
Except for current sensign, Hall sensors are mostly provided into an electronic package (eg : SOT23, TO3, SO8) with a logic output (non linear). Theses output can be :
- Linear, for current sensing : proportional to magnetic field
- Bipolar: they generally switch on with a south pole of sufficient strength and switch off with a north pole of sufficient strength however the output state is not defined if the magnetic field is removed. Some bipolar Hall-effect switches will change the output state and some sensor ICs will not. These Hall-effect switches are designed for magnetic actuation using a north-south alternating field, multi-pole ring magnet.
- Latch : the Hall-effect digital latches will always switch on with a south magnetic of sufficient strength and switch off with a north magnetic field of sufficient strength. The output will not change if the magnetic field is removed. To change the output state, the opposite magnetic field polarity must be applied.
- Omnipolar : unlike other Hall-effect switches, these devices switch on with the presence of either a north or south magnetic field that has sufficient strength; in the absence of a magnetic field the output is off.
- Unipolar : the unipolar Hall-effect switch is characterized by the magnetic operate threshold (Bop). If the Hall cell is exposed to a magnetic flux density greater than the operate threshold, the output transistor is switched on; by dropping below the threshold (Brp), the transistor is switched off. The hysteresis (Bhys) is the difference between the two thresholds (Bop-Brp). This built in hysteresis allows clean switching of the output even in the presence of external mechanical vibration and electrical noise. The digital output from a unipolar Hall-effect can be adapted to various logic systems. These devices are ideal for use with simple bar or rod magnets.
Brushless Motor Appliance
Many Brushless motors use hall sensors, in order to provide rotor position to the electronic power. Two types of Brushless motors can use these sensors :
- Bipolar : Only one hall sensor is needed, there are only two power sequences provided by an full H bridge.
- Tri-Phase : 3 sensors are needed, because there are 6 sequences that can be provided by the Tri-Phase bridge.
In general, bipolar output are used for brushless motor, because rotor change directly from north to south.
If you need more information about Brushless motors, and other sensors capabilities, click here.
References
http://www.allegromicro.com/en/Products/Design/Tech_Pubs.asp
http://www.allegromicro.com/en/Products/Categories/Sensors/index.asp
Ping : Brushless Motors | Stéphane RATELET
Ping : Motor Drive Module | Stéphane RATELET